transform-function
<transform-function> CSS 数据类型用于对元素的显示做变换。通常,这种变换可以由矩阵表示,并且可以使用每个点上的矩阵乘法来确定所得到的图像。
2D 图形 的坐标系统
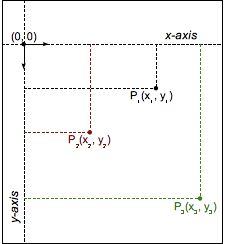
笛卡尔坐标
在笛卡尔坐标系中,每个 欧氏空间 里的点都由横坐标和纵坐标这两个值来确定。在 CSS(和大部分的计算机图形学)中,原点 (0, 0) 在元素的左上角。每个点都使用数学上的向量符号 (x,y) 来描述。
示例
变换函数对比
以下示例提供了一个由 DOM 元素和变换创建的 3D 立方体,以及一个选择菜单,允许你选择不同的变换函数来变换立方体。因此,你可以比较不同变换类型的效果。
选择一个选项,将变换应用到立方体上;2 秒后,立方体会恢复到初始状态。立方体的初始状态使用了 transform3d() 以进行略微的旋转,以便你查看每一个变换的效果。
HTML
html
<main>
<section id="example-element">
<div class="face front">1</div>
<div class="face back">2</div>
<div class="face right">3</div>
<div class="face left">4</div>
<div class="face top">5</div>
<div class="face bottom">6</div>
</section>
<div class="select-form">
<label for="transfunction">选择变换函数</label>
<select id="transfunction">
<option selected>选择函数</option>
<option>rotate(360deg)</option>
<option>rotateX(360deg)</option>
<option>rotateY(360deg)</option>
<option>rotateZ(360deg)</option>
<option>rotate3d(1, 1, 1, 90deg)</option>
<option>scale(1.5)</option>
<option>scaleX(1.5)</option>
<option>scaleY(1.5)</option>
<option>scaleZ(1.5)</option>
<option>scale3d(1, 1.5, 1.5)</option>
<option>skew(17deg, 13deg)</option>
<option>skewX(17deg)</option>
<option>skewY(17deg)</option>
<option>translate(100px, 100px)</option>
<option>translateX(100px)</option>
<option>translateY(100px)</option>
<option>translateZ(100px)</option>
<option>translate3d(50px, 50px, 50px)</option>
<option>perspective(200px)</option>
<option>matrix(1, 2, -1, 1, 80, 80)</option>
<option>matrix3d(1,0,0,0,0,1,3,0,0,0,1,0,50,100,0,1.1)</option>
</select>
</div>
</main>
CSS
css
main {
width: 400px;
height: 200px;
padding: 50px;
background-image: linear-gradient(135deg, white, cyan, white);
}
#example-element {
width: 100px;
height: 100px;
transform-style: preserve-3d;
transition: transform 1.5s;
transform: rotate3d(1, 1, 1, 30deg);
}
.face {
display: flex;
align-items: center;
justify-content: center;
width: 100%;
height: 100%;
position: absolute;
backface-visibility: inherit;
font-size: 60px;
color: #fff;
}
.front {
background: rgba(90, 90, 90, 0.7);
transform: translateZ(50px);
}
.back {
background: rgba(0, 210, 0, 0.7);
transform: rotateY(180deg) translateZ(50px);
}
.right {
background: rgba(210, 0, 0, 0.7);
transform: rotateY(90deg) translateZ(50px);
}
.left {
background: rgba(0, 0, 210, 0.7);
transform: rotateY(-90deg) translateZ(50px);
}
.top {
background: rgba(210, 210, 0, 0.7);
transform: rotateX(90deg) translateZ(50px);
}
.bottom {
background: rgba(210, 0, 210, 0.7);
transform: rotateX(-90deg) translateZ(50px);
}
.select-form {
margin-top: 50px;
}
JavaScript
js
const selectElem = document.querySelector("select");
const example = document.querySelector("#example-element");
selectElem.addEventListener("change", () => {
if (selectElem.value === "Choose a function") {
return;
} else {
example.style.transform = `rotate3d(1, 1, 1, 30deg) ${selectElem.value}`;
setTimeout(() => {
example.style.transform = "rotate3d(1, 1, 1, 30deg)";
}, 2000);
}
});
结果
规范
| 规范 |
|---|
| CSS Transforms Module Level 1 # transform-functions |
| CSS Transforms Module Level 2 # transform-functions |