OrientationSensor: populateMatrix() method
Limited availability
This feature is not Baseline because it does not work in some of the most widely-used browsers.
Secure context: This feature is available only in secure contexts (HTTPS), in some or all supporting browsers.
The populateMatrix() method of the
OrientationSensor interface populates the given target matrix with the
rotation matrix based on the latest sensor reading. The rotation matrix is shown
below.
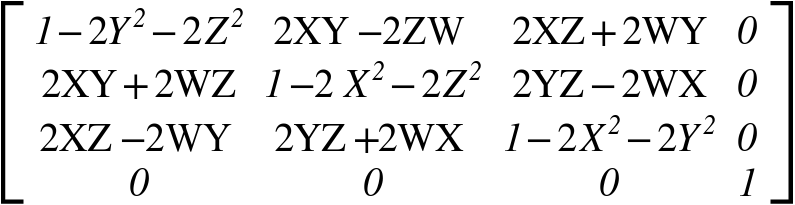
where:
- W = cos(θ/2)
- X = Vx * sin(θ/2)
- Y = Vy * sin(θ/2)
- Z = Vz * sin(θ/2)
Syntax
js
populateMatrix(targetMatrix)
Because OrientationSensor is a base class, populateMatrix
may only be read from one of its derived classes.
Parameters
targetMatrix-
TBD
Return value
None (undefined).
Examples
js
// TBD
Specifications
| Specification |
|---|
| Orientation Sensor # orientationsensor-populatematrix |